






Water Tunnel Specialized for Flow Visualization
This unique water tunnel can be used to visualize the flow around insect type wings in order to investigate the flow mechanism of such as flapping wings and corrugated airfoil sections.

|
|
||
| Water tunnel specialized for flow visualization. | Flow visualization. |


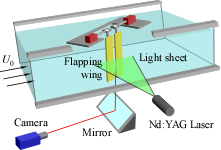
3D PIV (Particle Image Velocimetry) System
This equipment can be used to visualize and quantify the unsteady flow around flapping wings of insect in order to investigate the flow mechanism of a flapping wing.
|

|
| 3D PIV system for tandem flapping wings. | Dynamically scaled flapping model of a bumblebee in water tunnel. |
Three Cameras and 3D Motion Analyzer System
This system can be used for obtaining the quantitative data of the free-flight of a dragonfly such as a body motion and corresponding flapping and feathering wing motions.

|

|
| Three cameras and 3D motion analyzer system. | Picture of dragonfly at take-off. |
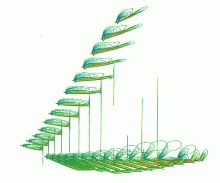
Numerical Simulation System
This system is the PC cluster of 20 nodes. This system can be used to analyze the unsteady flow around a flapping wing with 3D Navie-Stokes code which takes aeroelastic effects into account.

|
|
| PC Cluster. | Visualization of unsteady flow around a flapping wings of a dragonfly. |