








Research and Development of a Micro Flying Robot with Flapping Wings
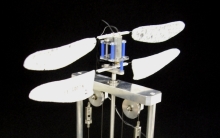
In this study, we are working on research and development of flying robots with flapping wings, especially a dragonfly-type MAV with resonance type flapping wings, and a Kite-Hawk type UAV with aeroelastically deformable wings.

|
|
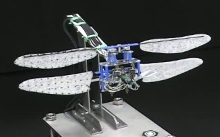
| Resonance type flapping robot. | Hovering test of the resonance type flapping robot. |

|

|
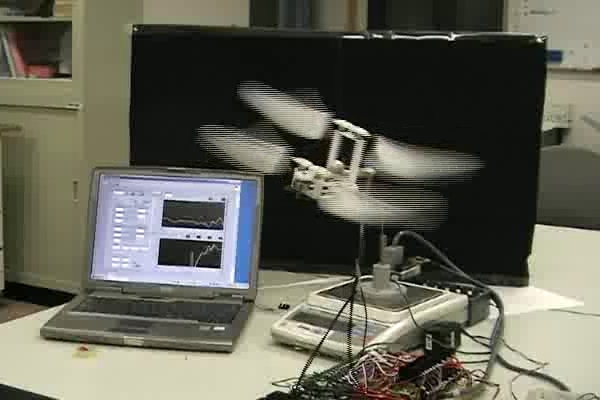
| Measurement of thrust for the resonant type flapping wing. | Kite-Hawk type flying robot. |
Controlled test for the resonace type flapping robot
We have conducted controlled tests of the resonance type flapping robot, which was free to rotate around the center of gravity. We can control the attitude of the resonance type flapping robot.
Tethered test flight for the resonant type flapping robot
We can control the attitude of the tethered flapping robot with an attitude sensor.
|

|
Research of Aerodynamic Characteristics in Low Reynolds Numbers
In this study, we are investigating aerodynamic characteristics of flapping wings and corrugated airfoil sections in low Reynolds numbers using CFD, measuement of fluid forces, and visualization by PIV and tracer methods in water tunnel.
|

|
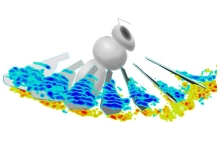
| Flow visualization of vorticity around a bumblebee wing with PIV method. | Flow visualization around an airfoil in low Reynolds numbers. |
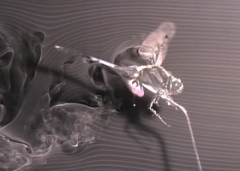
Flow visualization around insects with a smoke-wire method
You can see vortices around the insect wings. The vortices enhance lift acting on the insect wings.

|
|
| Flow visualization around a wasp (MPG file-2.5MB) | Flow visualization around a dragonfly (MPG file-3.3MB) |
Research and Development of a Micro Flying Robot with Fixed Wings
In this study, we are developing a high performance MAV with fixed wings which employs a corrugated airfoil section like dragonfly.

|

|
| Test model of MAV employing a fixed wing with a corrugated airfoil section. | Picture of test flight. |
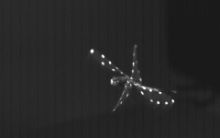
Research on Flight Dynamics and Control of Dragonfly
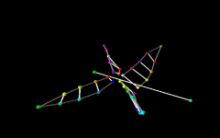
In this study, we are investigating the flight dynamics and control characteristics of a dragonfly using 3D motion analyzer with three high-speed video cameras.
The dragonfly can change the attitude quickly during a few flapping cycles because it has a small inertia and produces a large aerodynamic force.
|
|
| Ffree flight of a dragonfly. | 3d analysis of a dragonfly. |
The dragonfly moves the fore- and hing wings in the same timing when the takeoff. Then, the hind wing leads the forewing as the dragonfly moves forward.

The bumblebee can slightly change the attitude during a flapping cycle because it has a large inertia compared to the aerodynamic force.
