




共振型羽ばたきロボットの開発
本研究室では、トンボを模擬した4枚翼の超小型羽ばたきロボットを開発しています。 ロボットの軽量化、駆動システムの単純化のために共振型羽ばたき翼を採用しました。 共振型羽ばたき翼を用いることで、駆動システムを簡単にでき、 なおかつ駆動トルクが小さくても良いことから小さなモータで、 高い羽ばたき振動数を実現することができました。
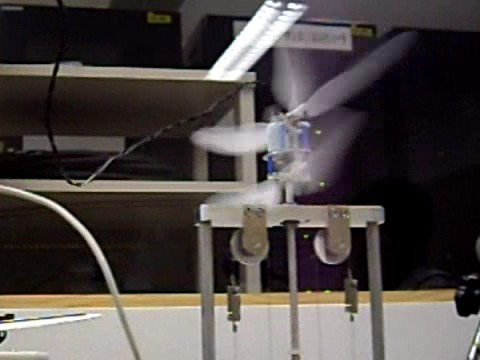
図1.ホバリング実証試験の様子
動画(WMV形式-2.5MB) |
これまでの基礎実験や数値シミュレーションによる計算結果から、
羽ばたき振動数40Hzで共振型羽ばたき翼1枚当たり約10gfの推力が生成されることが分かりました。
つまり、4枚翼では40gfの機体をホバリングさせる能力があることを意味します。
このことを実証するために、図1に示されるホバリング実証模型を制作しました。
この模型機は、4枚の共振型羽ばたき翼を1個のモータで動かすことができ、
その総重量は35gfになります(ただし、電源は外部電源です)。
動画で示されるように、約40Hzで羽ばたくことで、総重量35gfを上回る推力を発生し上昇することができました。ただしこの機体はまだ姿勢安定のための制御を行っていないので、機体が回転しないように支持装置に取り付けて行いました。
現在は、羽ばたきロボットの姿勢制御に関する研究を行っており、 羽ばたきロボットのフリーフライトの実現を目指しています。